


Autonomous Driving: The vehicle of the future will be more autonomous, making driving less stressful. But how will design engineers get there?
Key takeaways:
- Software-defined vehicles are shifting automotive design toward scalable platforms that can evolve through software updates rather than hardware changes.
- Integrating radar, lidar and camera data through sensor fusion will be essential for achieving higher levels of automated driving.
- As vehicles process more high-bandwidth sensor information, automotive Ethernet will serve as the backbone for reliable, real-time data movement.
- Central compute systems will play a critical role by combining multiple sensor inputs to support accurate object classification and autonomous decision-making.
- TI’s portfolio, including radar devices, FPD-Link serializers/deserializers, automotive Ethernet and Jacinto processors, helps engineers develop end-to-end architectures for the next generation of vehicles.
Last summer in Italy, I held my breath as I prepared to drive down a narrow cobblestone road. It was pouring rain with no sign of stopping, and I could hardly see. Still, I pressed the gas pedal, my shoulders tense and my hands gripping the wheel.
This is just one example of a stressful driving experience. Whether it’s enduring a long road trip or crawling through bumper-to-bumper traffic, many people find driving to be nerve-wracking. Though we can spend weeks finding the perfect car, deliberating which seats will feel the most comfortable or which stereo system will sound the richest, it’s hard to enjoy the ride when you are constantly scanning for hazards, adjusting to changing weather conditions, or navigating unknown roadways.
But what if you could appreciate the experience of being in your vehicle while trusting your car to navigate the stressful drives for you?
We’re progressing toward that future, with worldwide investment in autonomous vehicles expected to grow by over US$700 million in 2028. But to understand the vehicle of the future, we must first understand how its architecture is evolving.
How software-defined vehicles (SDVs) are transforming automotive architecture
I can’t discuss the vehicle of the future without starting with the transition to software-defined vehicles (SDVs). Because SDVs have radar, lidar and camera modules, they are critical to a future where drivers have the latest automated driving features without having to purchase a new vehicle every few years.
For automotive designers, SDVs require separating software development from the hardware, fundamentally changing the way that they build a car. When carmakers consolidate software into fewer electronic control units (ECUs), they can make their vehicle platforms more scalable and streamline over-the-air-updates. These ECUs can handle the control of specific autonomous functions in real time, such as automatic breaking or self-steering modules.
How integrated sensor fusion enables higher levels of vehicle autonomy
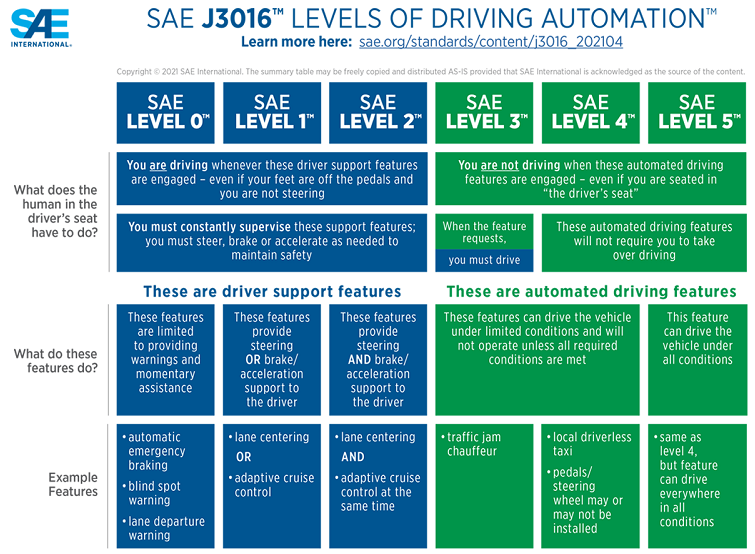
When SDVs centralize software, they’re capable of integrating advanced driver assistance system technologies, that enable increased levels of vehicle autonomy. On today’s roads, using the Society of Automotive Engineers’ Levels of Driving Automation, level 1 or 2 (which requires people to drive even when support features are engaged) is the most prevalent. But what about in the future?
I envision that one day, every car will have accurate level 3 or 4 autonomy, characterized by automated driving features that can operate a vehicle under specific conditions. The advances in technology happening now will enable drivers to trust features in future vehicles as much as features like cruise control today. Instead of being fully responsible for stressful driving tasks, we can trust the vehicle’s system to take the lead. And at the heart of this evolution is semiconductors.
To achieve higher levels of vehicle autonomy, the ability to accurately detect and classify objects and respond in real time will require more advanced sensing technologies. The concept of combining data from multiple sensors to capture a comprehensive image of a vehicle’s surroundings is called sensor fusion. For example, if a radar sensor classifies an object as a tree, a second technology such as lidar or camera can confirm it in order to communicate to the driver that the tree is 50 feet ahead, enabling swift action.
Why future vehicles need a high-speed, ethernet-based data backbone
I like to say that tomorrow’s cars are like data centers on wheels, processing multiple, large streams of high-speed data seamlessly.
The car’s computer, among other functions, coordinates things such as radar, audio and data transfer in a high-speed communication network around the vehicle. While legacy communication interfaces for in-vehicle networking such as Controller Area Network (CAN) and Local Interconnect Network (LIN) remain essential for controlling fundamental vehicle applications such as doors and windows, these interfaces must seamlessly integrate with emerging technologies. In order to accommodate the higher data processing needs of new vehicles, Ethernet will be the prevailing technology. Automotive Ethernet has emerged as a “digital backbone” to efficiently manage applications ranging from audio to standard radar.
As vehicles become capable of higher levels of autonomy, automotive designers will need higher-bandwidth networks for applications including high-resolution video and streaming radar. At TI, our portfolio supports diverse functions with varying requirements, readying us for that network evolution. With technologies like FPD-Link, vehicles can stream uncompressed, high-bandwidth radar, camera and lidar data to the central compute to respond to events in real-time.
Design engineers must also have a powerful processor in the central computing system that can take data from multiple technologies such as lidar, camera and radar sensors to complete a fast, real-time analysis and provide a 4D data breakdown to better perform object classification.
With expertise in radar, Ethernet, FPD-Link technology and central compute, TI works with automotive designers to help optimize solutions from end to end. Rather than designing devices that only perform one function, we look at how to best optimize our device ecosystem. For example, we design radar devices that easily interface with our Jacinto processors to achieve faster, more accurate decision-making.
What these advancements mean for the future driving experience
In the future, if I encounter the same road and rainy conditions in Italy as I did this summer, I might not drive. Instead, I might trust my car to safely get me to my destination, while I relax in my seat.
The vehicle of the future might not exist yet. But the technologies we’re developing today are making the vehicle of the future – and maybe even the next breakthrough of the future – real.
Source: TI blog














{kind=link}