


IOWN® APN-Based Remote Controlled Robotic Inspection – Four NTT Group companies – NTT EAST, Inc., NTT DOCOMO SOLUTIONS, Inc., NTT DATA Group Corporation, and NTT DOCOMO BUSINESS, Inc.- (hereinafter referred to as the “the NTT Group”), 1Finity Inc. of the Fujitsu Group (hereinafter referred to as “1Finity”) and Mitsubishi Chemical Corporation of the Mitsubishi Chemical Group (hereinafter referred to as “Mitsubishi Chemical”), aim to reduce the burden on on-site workers inspecting outdoor factory facilities by implementing smart maintenance through the use of the IOWN® APN [1] and AI.
In February 2026, in the Mizushima Coastal Industrial Zone (“Mizushima Industrial Complex”) in Okayama Prefecture, the three companies – namely, the NTT Group, 1Finity, and Mitsubishi Chemical – confirmed that the use of the high-capacity, low-latency communication environment utilizing IOWN® APN and 60 GHz wireless LAN allows real-time collection of large volumes of data.[2]
In this verification, the companies evaluated the advancement of outdoor facility inspections through the use of physical AI technologies, such as autonomous robots and digital twins, leveraging the above communication environment.
Specifically, the companies conducted verification on the following items and obtained effective results with a view toward practical implementation:
(1) Achieving remote operation and autonomous navigation of robots in outdoor environments
(2) Transmitting data acquired from cameras and microphones mounted on the robots with low latency
(3) Analyzing the acquired data in real time using AI to detect abnormalities related to vibration and sound
(4) Reflecting AI-analyzed data in a digital twin environment to detect cracks
Going forward, the companies will integrate diverse types of data – including video, audio, odor, and temperature – to realize advanced cognitive capabilities that can substitute for human five senses and further reduce the burden on on-site workers.
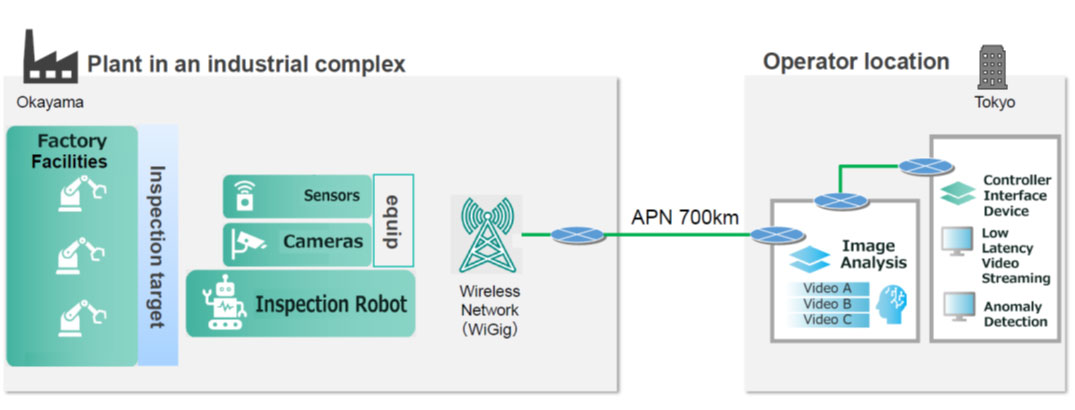
Figure 1. Diagram of this verification

Figure 2. Verification using robots at Mitsubishi Chemical’s Okayama Plant
Quadruped robot: Conducts anomaly detection related to vibration and sound
Four-wheel-drive robot: Performs crack inspection using a digital twin environment
Background
The NTT Group, 1Finity, and the Mitsubishi Chemical are participating in the IOWN Global Forum™ (hereinafter referred to as “IOWN GF”) as part of their initiative to realize a sustainable society. [3] The three companies have been collaborating with IOWN GF partner companies to develop a reference implementation model for the “Remote Controlled Robotic Inspection” use case, which includes the functions and requirements for remotely operating robots to perform factory facility inspections. In 2024, the companies are conducting a pilot verification experiment for factory inspections that combines remotely operated robots utilizing the IOWN® APN with AI-based video analysis. [4] In February 2026, the companies also carried out a verification of a high-capacity, low-latency communication environment utilizing IOWN® APN and 60 GHz wireless LAN (WiGig) [5].
Overview of this verification
In industrial complexes where large-scale factory facilities are concentrated, regular outdoor inspections of the facilities are essential to ensure safe and stable operation. However, in large-scale facilities, inspection work requires significant man-hours. As a result, reducing the burden on on-site workers has long been a challenge. To address the challenge, the companies conducted a verification of advanced outdoor facility inspections using physical AI technologies – such as autonomous robots and digital twins – leveraging a high-capacity, low-latency communication environment enabled by IOWN® APN and WiGig.
Specifically, the following items were verified:
- As in the previous verification [2], a high-capacity, low-latency communication environment was established over a distance of approximately 700km between Mitsubishi Chemical’s Okayama Plant and NTT Group buildings in Tokyo using IOWN® APN and WiGig.
- Under this communication environment, remote operation and autonomous navigation of two different types of robots were successfully achieved.
- Data acquired from cameras and microphones mounted on the robots were transmitted with low latency.
- Video and audio data acquired were analyzed in real time using AI to detect abnormalities related to vibration and sound.
- The acquired video data were analyzed using AI and then reflected in a digital twin environment to detect cracks.
Verification details and results
- Establishment of a high-capacity, low-latency communication environment
An IOWN® APN environment was established between Mitsubishi Chemical’s Okayama Plant and NTT Group buildings in Tokyo (approximately 700km apart), utilizing “docomo business APN Plus powered by IOWN®” provided by NTT DOCOMO BUSINESS.
In addition, multiple WiGig access points were deployed within the Okayama Plant premises to create a wide-area wireless communication environment covering approximately 150m × 150m.
Furthermore, through the adoption of terminal-driven dynamic site diversity control technology [6], the system ensures a stable operating environment in which robots equipped with WiGig devices can continuously operate by dynamically selecting and switching to the optimal access point while running the perimeter of the area.
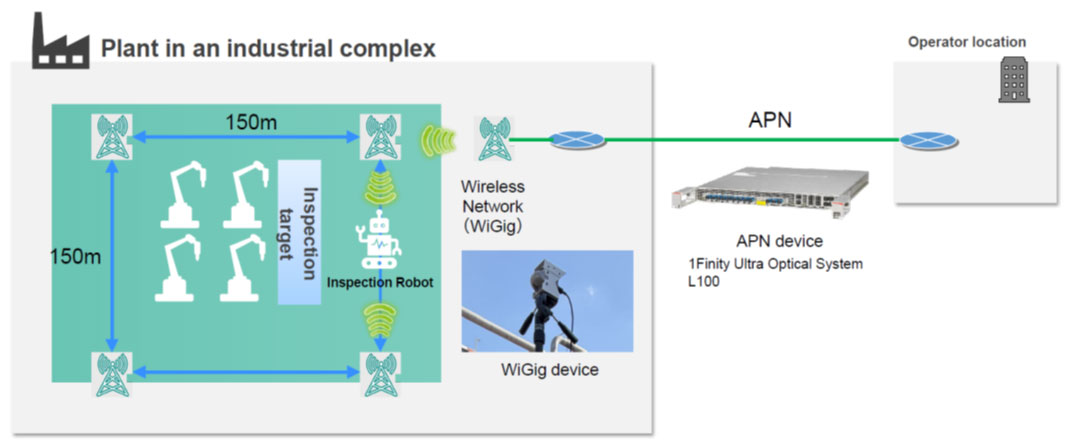
Figure 3. Communication environment in this verification
- Remote operation and autonomous navigation of robots
Using the above communication environment, an operator located in a building in Tokyo remotely controlled a quadruped robot at the Okayama Plant. The robot was able to complete a full lap around a 150m × 150m perimeter without human assistance.
It was also confirmed that the robot can safely stop in the event of a communication interruption.
Furthermore, the companies verified whether the quadruped robot could operate autonomously. The robot was able to navigate the perimeter without losing its position while generating maps using only its sensors. It was also confirmed that the robot could detect and avoid obstacles (such as humans and objects).
In addition, it was confirmed that a four-wheel-drive robot could also achieve autonomous navigation within the same communication environment.

Figure 4 (left): Quadruped robot in operation
(right): Video captured by the robot
- Transmission of data acquired from robot-mounted devices
Video data captured by the robots under the wireless communication environment were transmitted from the Okayama Plant to a building in Tokyo – approximately 700 km away – via IOWN® APN. Even while the robots were in motion, video latency was kept within the target of 500 milliseconds.
Based on these results, it was confirmed that the robots can stably operate autonomously while maintaining video streaming. Furthermore, the effectiveness of a high-capacity, low-latency communication environment in supporting remote monitoring and control of the robots was successfully demonstrated.
- Verification of anomaly detection in sound and vibration using robotsNon-contact cameras and microphones mounted on a quadruped robot were used to simultaneously collect video and audio data. By analyzing these data with AI, the companies evaluated the accuracy with which anomalies can be detected.In this verification, a pump and piping system generating abnormal noise (water hammer noise) were targeted. By analyzing the data captured near the pump and piping using the robot’s cameras and microphones, the AI detected anomalies indicating conditions different from normal operation. These results showed no significant deviation from the values obtained from sensors installed on the piping.These results demonstrate that the use of robots can achieve sufficient accuracy to determine whether abnormalities have occurred in pump equipment.
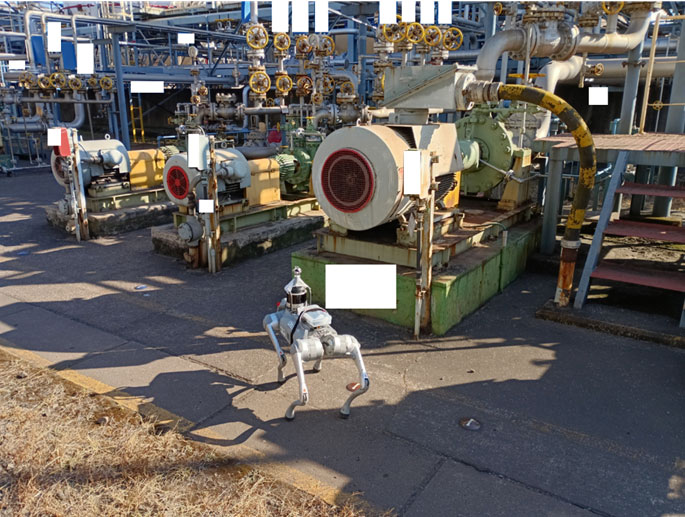
Figure 5. Quadruped robot collecting data
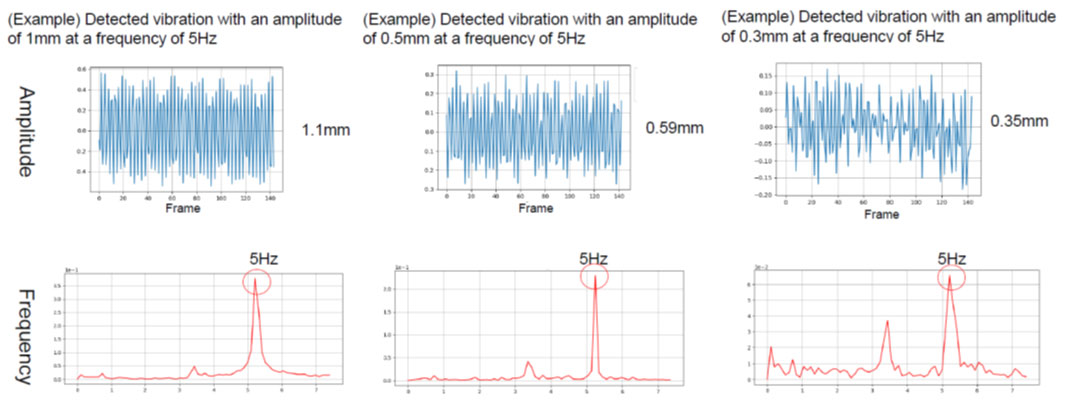
Figure 6. Example of vibration analysis results from video data
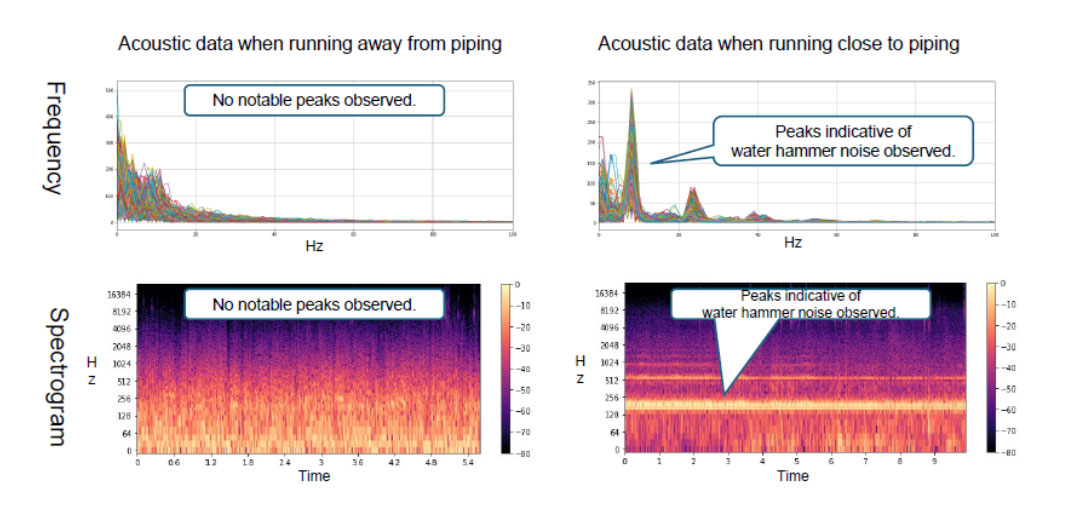
Figure 7. Example of acoustic analysis results
- Crack inspection using autonomous robots and a digital twin environment
An autonomous four-wheel-drive robot was used to run around a 150m × 150m perimeter, generating a 3D spatial map to establish the base for a digital twin environment.
Next, the streaming video data captured by the robot were transmitted from the Okayama Plant to a building in Tokyo via IOWN® APN, where they were analyzed using image recognition AI and then reflected in the digital twin environment.
In the verification, information on cracks in concrete structures was visualized in real time within the digital twin environment, and detailed crack conditions could be examined by selecting the corresponding images.In this process, the entire workflow – from video data acquisition to AI analysis and reflection in the digital twin environment -was completed within 500 milliseconds. In addition, high communication stability was achieved, with packet loss during video transmission kept below 0.1%. Furthermore, it was confirmed that minute cracks with the potential to develop into larger cracks in the future can be detected.
Based on these results, the feasibility of real-time remote facility inspection and predictive maintenance using physical AI technologies, such as autonomous robots and digital twins, was demonstrated.
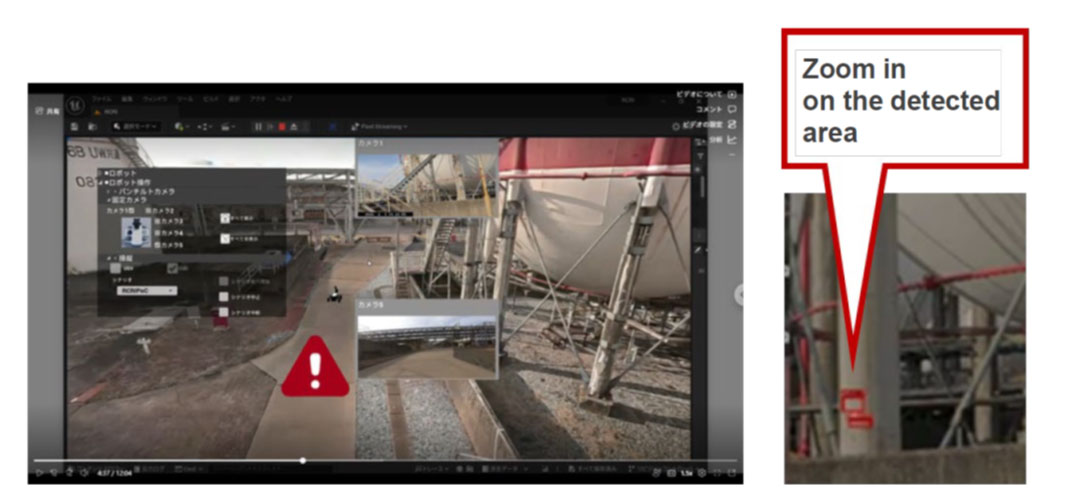
Figure 8. Digital Twin Environment and Crack Detection
- Results of this verification
Through the establishment of a high-capacity, low-latency communication environment, the following were demonstrated:
(1) Stable autonomous operation of robots while concurrently acquiring data
(2) The feasibility of real-time remote facility inspection and predictive monitoring through the use of physical AI technologies, such as autonomous robots and digital twins
These technologies enable the centralization of inspection personnel and the simultaneous inspection of multiple sites, thereby contributing to reducing the burden on on-site workers responsible for inspecting factory facilities in industry complexes.
Looking Ahead
To promote further reduction of the burden on on-site workers, it is necessary to realize “advanced cognitive capabilities that can substitute for human five senses” by integrating diverse types of data, including video, audio, odor, and temperature. Going forward, the companies will continue conducting additional verifications aimed at advancing computing platforms capable of supporting multimodal AI processing [7].
Roles of each company in this verification
| The NTT Group | Deployment of the IOWN® APN environment between the Okayama Plant and the Building in Tokyo, deployment of the WiGig environment, robot running tests, data acquisition from robot-mounted devices, and construction of a digital twin environment using AI |
| 1Finity | Provision of technical expertise regarding the construction of the IOWN® APN network, as well as the supply of related devices |
| Mitsubishi Chemical | Definition of functional and non-functional requirements for the communication environment necessary for factory facility inspections, and provision of the experiment site |
Comments from each company
NTT DOCOMO SOLUTIONS, Inc.
Yoshinori Kitada
Executive Officer, Vice President, IOWN Business Promotion Department, Network & Cloud Division
“This verification highlights the potential to transform industrial infrastructure through the integration of the next-generation communication platform envisioned by the IOWN® initiative with robotics, AI, and digital twin technologies.
By enabling real-time data collection, analysis, and visualization in an integrated manner, it marks a significant step toward enhancing safety and reducing the burden on on-site workers through advanced remote inspection and predictive monitoring.
We expect these technologies to be expanded across a wide range of industrial fields and to contribute to the realization of a sustainable society.”
NTT DATA Group Corporation
Yoko Inaba
Vice President, Head of Innovation Technology Department, Technology and Innovation General Headquarters
“At NTT DATA Group, our technology strategy under the mid-term management plan is centered on advancing initiatives across three domains—Emerging, Growth, and Mainstream—aligned with the maturity of each technology. At the Innovation Center, we are working to create new businesses through co-creation with our customers.[8]
This verification clearly demonstrates the transformative potential of combining physical AI with next-generation communication technologies to enable fully automated facility inspections through remotely operated and autonomous robots.
We will integrate field data with physical AI to create new value, advancing facility maintenance and transforming on-site operations, while contributing to the realization of sustainable smart maintenance and addressing challenges in industrial fields.”
For more information visit: https://www.1finity.com/
















{kind=link}