


By Michael Parks, Mouser Electronics
In space enthusiast circles there is an ongoing debate on the merits of manned versus robotic exploration. Although safety a good reason for preferring robotic missions over human exploration, astronaut Gus Grissom would probably disagree; just weeks before dying in the tragic Apollo 1 disaster he said, “The conquest of space is worth the risk of life. Our God-given curiosity will force us to go there ourselves because in the final analysis only man can fully evaluate the moon in terms understandable to other men.”1 And if NASA is successful, humans will set foot on the surface of Mars sometime in the 2030’s. Regardless of one’s position, a manned mission to Mars marks a milestone to our becoming a spacefaring civilization.
At the least, robots will be a partner in our voyage through the cosmos. Any manned exploration of the solar system will start with expeditions that contain few people, if for no other reason than the logistics and engineering required to sustain human life over a long period of time in the harsh environment of space. Augmenting expedition crews with robots makes sense, as well. Once humanity is ready to colonize the moon or Mars, robots will be sent ahead as construction crews to prepare for our long-term habitation. In short, robots will pave the way for our journey to the stars.
However, before we can check-in to the Mars Hilton, robots need improve in numerous ways. To illustrate this point, consider the Opportunity Mars rover, originally intended to carry out a 3-month mission. Eleven years later, Opportunity is still cruising along the Martian surface. The rover has added many new insights into our understanding of Mars and planetary formation in general. But behind our intrepid robot explorer is a small army of engineers, scientists, technicians, and mission planners who keep Opportunity on task. Every detail of tasking that Curiosity executes is meticulously planned here on Earth before it is transmitted to the rover. Thus, research is slow. In fact, it was just this year that Curiosity would have crossed the finish line had it been running a marathon.
This rate of exploration is insufficient if humanity is to achieve the dream of “a destiny in the stars” in the relatively near future. So how do we improve the robotic exploration crew to jumpstart our exploration of the solar system?
Brains and Brawn
One critical upgrade that robots will need is also the most challenging: the ability to reason and make decisions on their own without a human-in-the-loop (HuIL). Artificial Intelligence (AI) research is a key enabler to this capability. Not only is automated decision-making needed to keep a robot safe from falling into a crater, but more importantly AI is needed to imbue a robot with a sense of “informed curiosity.”
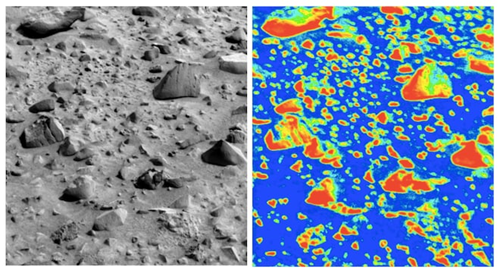
One such research project to give robots a refined sense of scientific inquisitiveness is called “TextureCam”, which is being spearheaded by the Jet Propulsion Laboratory. In a 2012 interview, TextureCam program manager David Thompson explained the goal is to “Make smart instruments that can do more with each command cycle.” Specifically, TextureCam would give robots the ability to decide on their own if a terrain feature or material is unique enough to warrant further research. This autonomy would be crucial in finding useful materials for building structures and possibly terraforming, before humans set foot on a distant world. In the more near-term, TextureCam will aid in many other aspects of space exploration including astrobiology and climate research.
Giving robots a “scientific mind” is not just an algorithm problem; significant improvements in computing hardware are required. Energy efficient designs that extract maximum computing performance per watt will be extremely important if we continue to rely on solar power. This is especially true for robots that venture far from the Sun. Additionally, to get the data into the “brain” to make decisions, the physical environment first needs to be sampled and digitized. Improved sensors and the fusion of multiple sensor data streams are also necessary for robots to make complex decisions based on varying stimuli.
In addition to the much-needed improvements to the “brains” of robotic explorers, there is also a need for more nimble and dexterous robots as well. From a locomotion perspective, motors and actuators that enable human or animal-like movement will allow robots to move faster and with increased agility. The ability to scale craters and mountains, for example, will allow us to reach a greater variety of geological features with a single robot. Another set of improvements would be to allow robots to use the same hand tools that human explorers use. This would reduce the need to carry functionally duplicate tools with different physical forms. To achieve such capabilities, robots will need to improve in object detection and in dexterity akin to human skill levels.

Better Communications
The time for a radio message to travel one-way between Earth and Mars can be measured in minutes. Jupiter communication is measured in hours. The vast distances between planets coupled with rotational alignments and “space weather” make communications difficult. However, communication is important if we want to make our robotic exploration efficient, reliable, and interoperable. Fortunately, one the founding fathers of the Internet, Vint Cerf, is already hard at work at Google doing preliminary research on technologies and protocols that will one day greatly improve interplanetary communications. Dubbed “Bundle” protocols, these robust communication systems employ a “store-forward” construct that allow nodes in the communications web to store packets until conditions are ideal (e.g. rotational alignment of two bodies) before transmitting data. While similar to the TCP/IP stack, these new protocols are specialized for the great distances and time delays involved. Not only would robots speak the language of these new protocols, but they would also be outfitted with enlarged onboard storage to be able to hold the data bundles from other robot-explorers until they can be transmitted back to Earth. Prototypes of these new communication protocols have already been employed on robotic explorers orbiting and cruising around Mars (e.g., Spirit, Opportunity, Curiosity, and the Phoenix lander.)

Self-Healing
Built in Test (BIT) diagnostics are useful for finding out what is wrong, but what about repair when the nearest technician is a world away? The ability to diagnose is not enough, especially when hardware is damaged. The ability to replace broken components is another crucial skill that robots will need for long-term exploration. Additive manufacturing and self-healing meta-materials need to be matured for greater reliability. In addition, 3D printing needs to utilize a much wider variety of materials. Specifically, we will need to the ability to transform “found materials” instead of bringing spools of print material. Robots that can heal themselves would allow humans to focus more on research and exploration and less on dawdling in the robot garage.
To Boldly Go
To many space enthusiasts, pursuing exploration of the cosmos is about preserving “the light of humanity.” While genuine and perhaps noble, investing in space exploration also has more immediate and amenable benefits, as well. In pursuing scientific goals, insight gained into improved robotics and AI will no doubt improve life on earth, just as previous space missions yielded technologies that we now take for granted every day. Fundamentally, the improvements needed for robotics comes down to autonomy. Robots that can reason, move nimbly, communicate effectively, and heal themselves will go a long way to freeing up human explorers to focus on bigger picture aspects. To be sure, humanity is going to the stars sooner or later. To get there we will increasingly rely on more capable and autonomous robots to serve as crucial companions in that journey.
















{kind=link}